[:fr]
Le système de vision 3D Dakota, dédié à l'inspection de composants, a été implanté dans deux nouveaux sites pour lesquels les contraintes d'encombrement et de temps de réponse étaient particulièrement fortes.
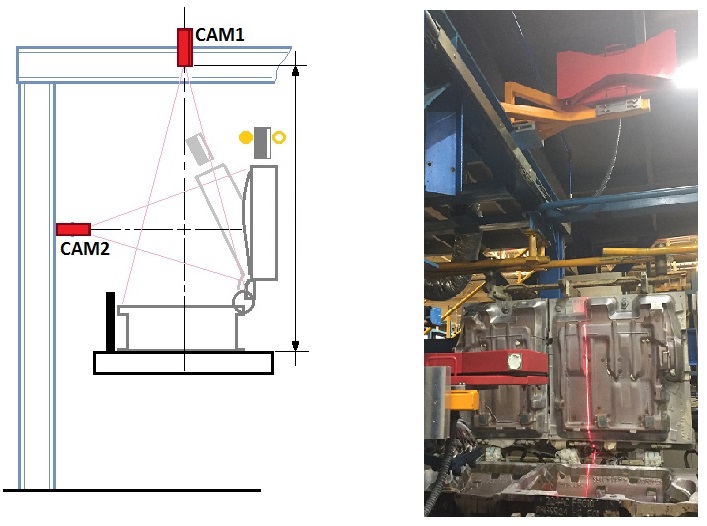
Gips Vision a su adapter la partie mécanique en fonction de l'espace disponible et améliorer les temps de traitement de l'application logicielle. Pour cela les modules permettant l'acquisition 3D ont été déportés sur des structures mécaniques spécifiques, situées à la perpendiculaire des moules à l'intérieur de la cellule robotisée d'injection. Cette position permet une acquisition du moule dans les meilleures conditions possibles.
De plus, le logiciel a été optimisé et le temps de traitement a été réduit d'environ 30% par rapport aux premiers systèmes, assurant une réponse juste à temps avant l'injection.
[:en]
Dakota, the 3D vision system dedicated to component inspection has been installed in two new sites for which space and time are very demanding.
Gips Vision was able to adapt the mechanical part as well as its software application to meet an environment that is both demanding in terms of space and response time. For this purpose, the 3D acquisition modules were transferred to specific mechanical structures in order to be positioned perpendicular to the molds, inside the injection booth. This position allows an acquisition at the best opening position. Moreover, the processing time has been improved by about 30% compared to the first systems to ensure a just-in-time response to the Robot shortly before injection.
[:de]
Dakota, das 3D-Bildverarbeitungssystem zur Komponentenprüfung im Schaumgussprozess, wurde vor kurzem in zwei neuen Anlagen im Betrieb genommen, in welchen die Randbedingungen und Antwortzeitbedürfnisse besonders beschränkt sind.
Dazu hat GipsVision die mechanische Integration sowie die Softwareanwendung angepasst, um sämtliche Anforderungen zu erfüllen. Entsprechend wurden die Bildaufnahmemodule separat in neugestaltete Gehäuse verschoben, damit diese innerhalb der Einspritzkabine senkrecht zu den Formen positioniert werden konnten, was eine Bildaufnahme an optimaler Stelle ermöglicht. Um die Ergebnisse zum Roboter kurz vor der Einspritzung senden zu können, wurden ausserdem die Anwendung optimiert und die Bearbeitungszeit verringert.
[:]



{kind=link}
{kind=link}
{kind=link}